Проектирование захватных устройств трелёвочных машин

При перемещении деревьев захваты должны исключать разжатие рычагов деревом или пачкой деревьев и выскальзывание последних из захвата. Конструктивно захватные устройства трелёвочных машин могут быть выполнены по различным схемам [1].
Изложенная ниже методика расчёта может быть применена при проектировании захватных устройств манипуляторов и кониковых захватных (зажимных) устройств, выполненных конструктивно по схеме, приведённой на рисунке 1.9 (в этом случае коник подобен захвату манипулятора, но перевёрнутому на 1800 в вертикальной плоскости). При расчётах рассматриваемых захватных устройств делаются следующие допущения:
1) дерево - твёрдое, симметричное относительно продольной оси тело;
2) плоскость вращения рычагов захвата нормальна к поверхности лесосеки;
3) захват зажимает ствол дерева (пачку деревьев) в трёх контактных точках А, Б, С (см. рисунок 1.9).
4) коэффициенты трения в этих точках равны для всех направлений взаимодействия элементов захвата с деревом.
При разработке конструкции захватных устройств необходимо учесть, что они должны крепиться шарнирно к рукояти или раме машины, иметь возможность вращения в горизонтальной плоскости и иметь синхронизаторы в виде тяг, соединяющих противоположные зажимные рычаги для синхронизации поворота последних вокруг своих осей.
В задании на курсовое проектирование или при выполнении лабораторно-практических занятий преподавателем указываются:
для захватов манипуляторов
· объём максимального по величине захватываемого дерева ![]() ;
;
· объём минимального по величине захватываемого дерева ![]() ;
;
· максимальное давление в гидросистеме PH.
для кониковых захватных устройств
· максимальный объём пачки деревьев – Q;
· минимальный объём пачки деревьев - Qmin;
· средний объём хлыста VХЛ;
· максимальное давление в гидросистеме PH;
· параметр lкон (см. рисунок 1.1).
Для примера возможные варианты учебных заданий с проектными параметрами приведены в таблице 1.2.
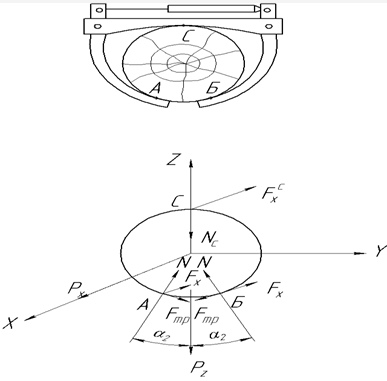
Рисунок 1.9 Схема для расчета захвата
Таблица 1.2Исходные данные для расчёта
|
Проектные параметры |
Номер варианта | |||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 | |
|
Vmaxхл, м3 Vminхл, м3 Q, м3 Qmin, м3 Vхл, м3 lКОН, м PН, Па |
1,1 0,12 3 0,66 0,22 0,9 107 |
1,2 0,14 3,5 0,75 0,25 0,95 107 |
1,3 0,16 4,2 0,9 0,3 1,0 107 |
1,4 0,18 5,0 1,1 0,36 1,1 107 |
1,5 0,2 5,8 1,3 0,42 1,2 107 |
1,6 0,22 8,5 1,8 0,45 1,35 107 |
1,7 0,24 9,5 2,0 0,5 1,4 107 |
1,8 0,26 11,5 2,4 0,6 1,5 107 |
1,9 0,28 15,2 3,2 0,8 1,6 107 |
2,0 0,3 19 4,0 1,0 1,75 107 |
Самое популярное:
Устройство грузовых автомобилей
Процесс газообмена, т.е. впуск свежего воздуха и выпуск отработавших
газов в соответствии с протеканием рабочего процесса, в каждом из цилиндров двигателей
ЯМЗ-236 регулируется механизмом газораспределения.
Механизм газораспределения ЯМЗ-236 характерен наличием двух клапанов на
цилиндр ...
История развития ВАЗ-2106
ВАЗ-2106 начали выпускать в Тольятти в 1976 году. От «тройки»
он отличался более мощным двигателем, объёмом 1,6 литров, изменённым кузовом и салоном. На момент своего появления это был самый престижный и
комфортабельный автомобиль. Он стал самым массовым автомобилем Волжского
завода. С на ...
Анализ внешней среды транспортной отрасли Хабаровского края
Транспорт является одной из экономических
подсистем народного хозяйства. Он служит материальной базой производственных
связей между отдельными странами и регионами мира для обмена товарами,
выступает как фактор, организующий мировое экономическое пространство и обеспечивающий
дальнейшую ...