Измерение пройденного пути автомобиля

Путь, пройденный автомобилем, измеряется не непосредственно, а путем пересчета по известному числу оборотов «пятого» колеса и его радиусу качения. Обороты прицепного, измерительного колеса фиксирует датчик, который замыкает измерительную электрическую цепь два раза за один оборот колеса. В качестве датчика использован геркон типа КЭМ – ЗА, установленный непосредственно в корпусе тахогенератора (рис. 8).
Для регистрации оборотов «пятого» колеса используется импульсный электрический счетчик (суммирующие приборы). Для четкого срабатывания импульсного счетчика применяется усилитель постоянного тока на базе транзистора КТ – 829, что позволяет облегчить режим работы контактной группы геркона.
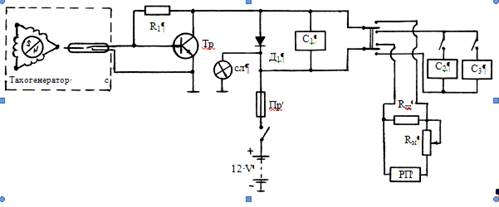
Рис. 8. Электрическая схема канала регистрации импульсов пути, R1 – 3 ком Тр – кт 829 А, Д1 – Д 226 Б Сл – сигнальная лампа, С1; С2; С3 – счетчики импульсов Рп – регистрирующий прибор, Rш – шунтирующее сопротивление Rм – масштабное сопротивление
Принцип действия:
Напряжение постоянного тока ![]() В через тумблер Вк1 подается на усилитель сигнала. О включении питания сигнализирует индикаторная лампа СЛ.
В через тумблер Вк1 подается на усилитель сигнала. О включении питания сигнализирует индикаторная лампа СЛ.
Поворот «пятого» колеса вызывает поворот магнитного поля ротора тахогенератора, что способствует замыканию и размыканию контактов геркона. В момент замыкания контактов транзистор закрывается и прерывает питание катушки электромагнитного счетчика С1. При размыкании контактов ток течет через резистор R1 и базовый переход транзистора Тр1 в результате чего транзистор открывается и подает питание на обмотку электромагнитного счетчика С1.
Диод Д применяется для шунтирования обратных выбросов напряжения на электрических обмотках счетчика, которые могут привести к выходу из строя транзистора. При вращении «пятого» колеса циклы включения и выключения повторяются. Счетчик регистрирует число циклов.
Расчет пройденного пути ведется по формуле:
S=L×nк,
где S - пройденный путь;
L - путь пройденный за один оборот «пятого» колеса;
n к - число оборотов «пятого» колеса.
Значение L определяется по формуле:
L=2×p×rк,
где rк - радиус «пятого» колеса.
Значение nк определяется по формуле:
nк=z/2,
где z - количество импульсов зарегистрированных электромагнитным счетчиком пройденного пути.
Примечание: В случае регистрации импульсов гальванометром самописца необходимо чтобы полное сопротивление электрической цепи гальванометра самописца соответствовало сопротивлению прежде включенных приборов. Подбор сопротивления производится сопротивлениями Rш и Rм.
Запись меток пути имеет на ленте самописца вид прямоугольных импульсов, наносимых два раза за один оборот «пятого» колеса.
Питание измерительных цепей
Стабилизатор напряжения автоматически поддерживает напряжение на стороне потребителя с заданной точностью, так как возникает дестабилизирующие факторы, вызывающие изменение напряжения (рис. 9).
Изменение выходного напряжения обусловлено:
1. Нестабильностью питающей цепи;
2. Изменением тока потребляемой нагрузки;
3. Изменением температуры окружающей среды.
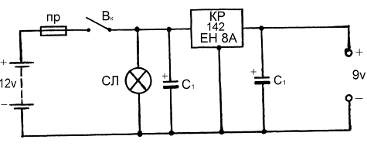 |
Применяемый тип стабилизатора, в случае установки его на радиатор охлаждения, обеспечивает стабилизированный ток до 1,5 А согласно техническим условиям на стабилизаторы данного типа.
Описанный комплекс обхватывает лабораторные циклы всех специальностей, связанных с движением АТС.
Самое популярное:
Разработка сводного планового бюджета для железнодорожной сортировочной станции
Значения отдельных показателей производственной программы (объёмных и
качественных) приведены в задании.
Расчёт объёмных показателей
По грузовой работе
Среднесуточное отправление в целом по станции и с выделением важнейших
грузов в тоннах, т/сут.:
(1.1)
где - годо ...
Тепловозные передачи
При разгоне поезда или его движении с
равномерной (установившейся) скоростью также требуются различные по величине
значения Fк. Вспомним велосипед. Сила,
которую надо прикладывать к педалям в процессе движения, не остается
постоянной. Например, наибольшая сила давления на педали необходи ...
Проектирование судов
При определении основных элементов проектируемого судна, а также при их
корректировке, производимой для улучшения каких-либо характеристик, необходимо
учитывать взаимосвязь элементов судна с его ходовыми характеристиками. Обычно
задача ставится следующим образом – выбрать элементы судна, ...