Математическая модель двигателя постоянного тока

Структурная схема двигателя постоянного тока представлена на рис. 3
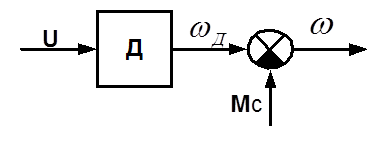
Рис. 3 Структурная схема ДПТ
На рис. 3 использованы следующие обозначения:
Д – двигатель
Мс – момент сопротивления, приложенный к валу двигателя
ωД - скорость вращения вала двигателя
ω – скорость вращения вала с учетом момента сопротивления
Расчётная схема двигателя постоянного тока независимого возбуждения (ДПТ НВ) представлена на рис. 4.
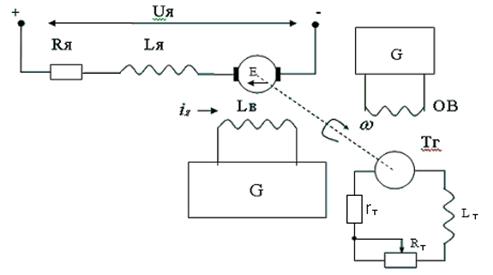
Рис. 4 Расчётная схема ДПТ
На рис. 4 использованы следующие обозначения:
- Lя – полная индуктивность цепи якоря ДПТ НВ, Гн;
- Rя – полное активное сопротивление цепи якоря, Ом;
- Е – ЭДС вращения якоря, В;
- ![]() – ток в цепи якоря, А;
– ток в цепи якоря, А;
- w – механическая угловая скорость, рад/с;
- Lн – полная индуктивность в цепи якоря тормоза, Гн;
- ![]() – полное активное сопротивление цепи нагрузки, Ом.
– полное активное сопротивление цепи нагрузки, Ом.
G – источник постоянного напряжения
Kн – коэффициент нагрузки
Фд – магнитный поток
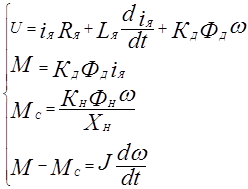
Из литературы известно, что математическая модель ДПТ НВ имеет следующий вид:
|
(2.1) (2.2) (2.3) (2.4) |
где, U – напряжение цепи якоря ДПТ НВ, В;
![]() – электромагнитный коэффициент двигателя;
– электромагнитный коэффициент двигателя;
М, Мс – соответственно момент развиваемый двигателем и момент статического сопротивления, развиваемый тормозом на валу двигателя, ![]() ;
;
J – момент инерции, ![]() ;
;
Хн – полное сопротивление цепи нагрузки, Ом.
![]()
Подставляя уравнения (2.2) и (2.3) в уравнение (2.4) получаем:
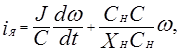
(2.5)
где, ![]() – электромагнитный коэффициент тормоза двигателя.
– электромагнитный коэффициент тормоза двигателя.
Продифференцируем данное уравнение и подставим его в уравнение (2.1):
 (2.6)
(2.6)
Приведём данное уравнение к стандартному виду
![]() следовательно:
следовательно:
|
(2.7) |
 ,
,
где,
![]()
откуда
|
(2.8) (2.9) |
![]()
 .
.
Учитывая что ![]() <<
<<![]() , тогда
, тогда
 .
.
Из выражения (2.9) можно сделать вывод, что при увеличении момента сопротивления тормоза путём уменьшения Хн, колебательный процесс, характерный для двигателя, работающего без нагрузки, вырождается в апериодический.
Рассчитаем параметры двигателя. Для этого перепишем уравнение (2.7), считая, что момент сопротивления на валу двигателя равен нулю, т.е. Хн равно бесконечности.
 . (2.10)
. (2.10)
Произведём замену
![]() ,
,  .
.
 . (2.11)
. (2.11)
|
(2.12) |
Тогда передаточная функция двигателя имеет вид:
Самое популярное:
Расчёт лётно-технических характеристик самолёта Ан-124
Динамика полета - это наука о законах движения
летательных аппаратов под действием аэродинамических, гравитационных и
реактивных сил.
Она представляет собой сочетание в основном трех
классических дисциплин: механики твердого тела, механики жидкости и газа и
математики.
Среди широко ...
Управление и обслуживание вагонного парка
Процесс обеспечения
погрузки вагонами на протяжении всей истории развития железных дорог
совершенствовался. В первые годы возникновения железных дорог вагоны обращались
только в пределах своей дороги. При необходимости перевозки грузов на другие
дороги и на стыковых станциях производилас ...
Проектирование узловой участковой станции
В данном проекте выбран полупродольный тип участковой станции.
Выбор полупродольного схемы обоснован двухпутной линией и недостаточной
фактической длиной станционной площадки.
Имеющаяся длина станционной площадки определяется по плану
трассы железнодорожной линии на участке для размеще ...